
電動カーでの使用例が多く紹介されている Smart Logger ですが、GPカーに搭載することも可能になっています。そこで紹介するのが、GPツーリングカーに Smart Logger を搭載して実施した、ドライビングの比較テストです。
テストに使用したのは、京商カップのピュアテンクラスに使用しているV-ONE SR。京商純正のGXR-15エンジンにラバータイヤを履くという仕様のマシンです。

このマシンが走る京商カップでは、レース中にドライバーを交代することが義務付けられていて、双方のドライバーにスピードがなければ勝利できないようなしくみになっています。
今回のテストでプロポを握るのは、京商カップで何度もコンビを組んでいる「kanki」と「ヒロシ」の二人。京商カップの参戦を意識して、データを収集するマシンを1台に絞り、交互に走行を行いながら「ドライビングにどんな違いがあるのか」に的を絞ったテストを実施しました。
ドライバーの二人には、これまでの経験からすでにこんな弱点が見えています。
kanki:燃費が悪く、タイヤの劣化が早い。
ヒロシ:コースレイアウトに慣れるのが遅い。
このポイントを踏まえた上で、お互いの弱点をデータロガーで確認、ドライビングを修正していこうという趣旨で走行を重ねていきます。

テストの場所として選んだのは黒井山ラジコンサーキット。2速で抜ける外周の高速コーナーと、インフィールドでは曲率の変化する複合コーナーが組み合わされた攻めがいのあるサーキットです。

当日は路面のコンディションが悪く、かなりグリップの低い状態からのスタートになりました。まずはお互いに1タンク走り、ベストラップを比較してみます。
 |
| 回転数、縦G、横G、スロットル、ステアリング(赤ヒロシ、黒kanki) |
グラフの赤線がヒロシ、黒がkankiのデータ。タイムはヒロシの19秒14に対し、kankiは18秒59。約0.6秒の差になりました。
やはり走り初めのタイムはkankiに分があるようです。kankiのほうが全開率が高く、ヒロシは攻め込めていないことがわかります。特に前半にある①、②のハイスピードで縁石をかすめる部分で、スロットル開度と車速に大きな違いが見られました。
ヒロシは外周コーナーの通過スピードが低い。この結果を元に2回めの走行に挑みます。
 |
| 回転数、縦G、横G、スロットル、ステアリング(赤ヒロシ、黒kanki) |
路面の向上もあり、ヒロシ18秒76、kanki18秒43までタイムアップ。
課題の高速コーナーは、一度スロットルを戻すヒロシの癖が抜けておらず、まだ差が付いています。
それに対してインフィールドを走る後半には、ほとんどタイム差がありません。
③の前後ではkankiのほうがメリハリのある操作をしていて、何度もフルスロットルにしていますが、タイムに貢献していないことがわかります。これでは燃費が悪いのにも納得です。
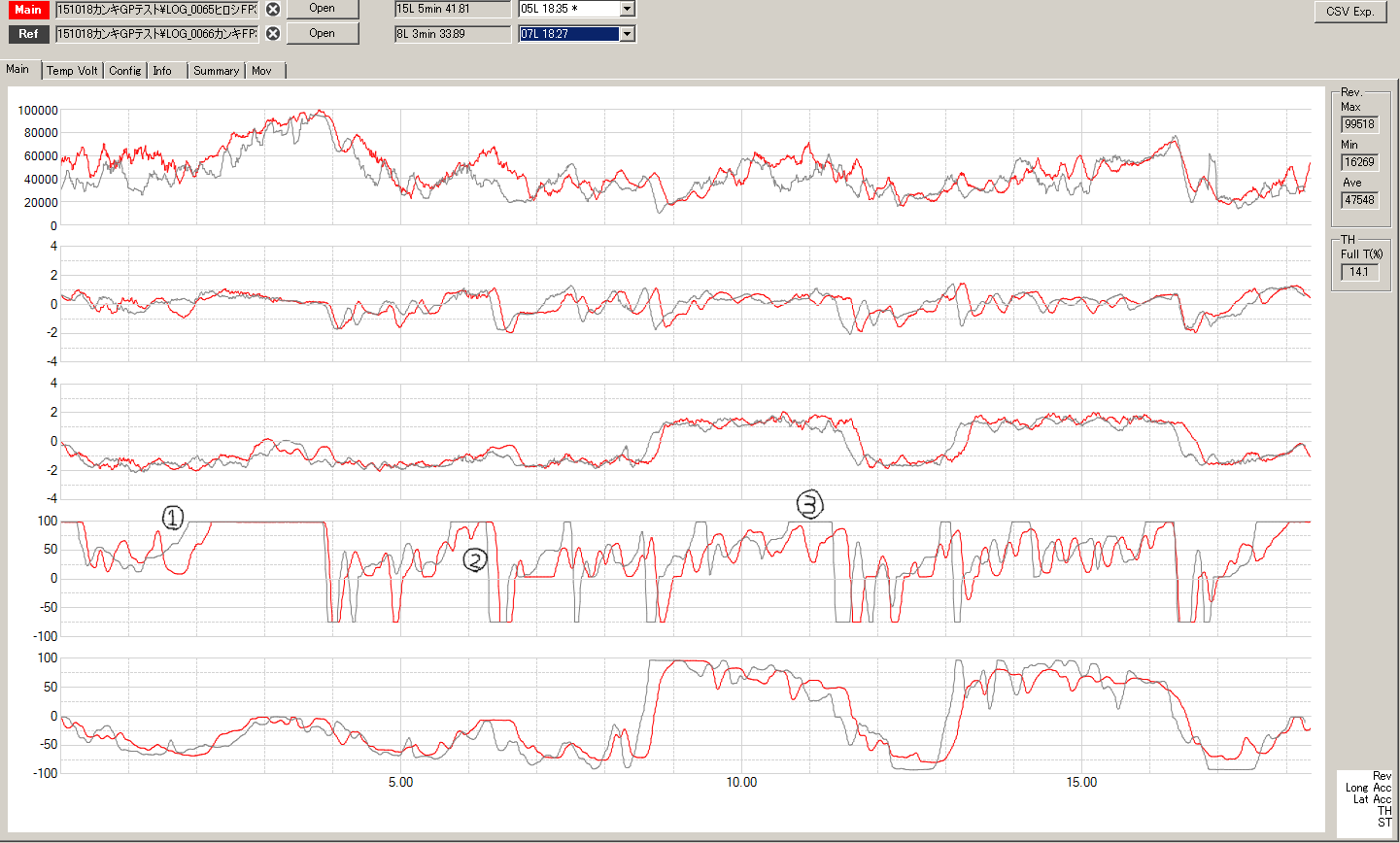 |
| 回転数、縦G、横G、スロットル、ステアリング(赤ヒロシ、黒kanki) |
3回めの走行になるとタイム差もグッと縮まって、ヒロシ18秒35、kanki18秒27。
やはり前半セクションでは差がありますが、かなり波形が重なるようになりました。
そして後半ではタイム差が逆転し、kankiが前半に稼いだタイムを後半でヒロシが巻き返しています。
グラフからはヒロシのなめらかなステアリング操作に比べて、kankiは修正舵が多いことが読み取れます。朝に比べると向上したとはいえ、まだまだ滑りやすい路面にアグレッシブすぎる操作は合っていません。攻めすぎることでkankiがタイムを失っている証拠でしょう。ラインをトレースできるからといってむやみにパワーを入れるのではなく、スムーズにコントロールできる範囲内で走ることが大切です。
ここまでの走行では、どちらのドライバーも弱点の修正には至っていません。
次の走行でこそは、と思ったところで・・・

突然のエンジンブロー、コンロッドを折ってしまいました。この時エンジンのヒートシンクヘッドは175℃。ちょっと回しすぎたようです。
次回のテストではもう少し回転数を下げないと。データロガーはエンジンのコンディション管理にも有効です!
0 件のコメント:
コメントを投稿